[强化学习]价值学习
定义
$U_t$ = $R_t + \gamma · R_{t+1} + \gamma ^ 2 · R_{t+2} + … \gamma ^{n - t} · R_n$.
其中$U_t$为Return,$\gamma \in $ [0,1]为折扣率。$U_t$以来于从t时刻开始的所有动作和状态,未来的动作A和状态S都是随机变量,因此$U_t$也是随机的。我们对$U_t$求期望就可以排除掉随机性。动作价值函数 的定义为
最优动作价值函数 用最大化消除策略π:
可以理解为已知$s_t$和$a_t$,不论未来采取什么样的 策略π ,回报$U_t$ 的期望不可能 超过 $Q^*$。简单的说就是Agent根据$Q^*$函数的期望来选择价值最高的动作。
DQN
简介
DQN是 一种价值学习的方法,利用一个神经网络Q(s,a;w)来近似$Q^*$(s,a)。神经网络的参数是w,输入是状态s,输出是很多数值a,这些事神经网络对每个动作的打分,通过奖励来寻训练神经网络。
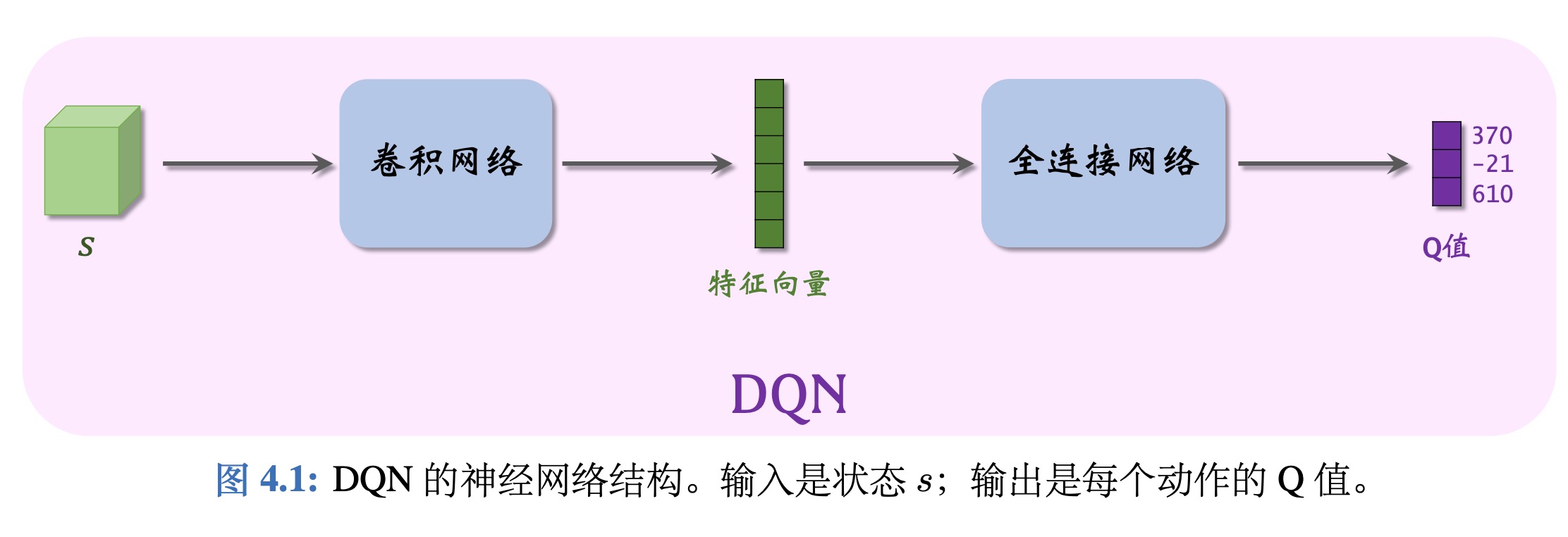
举个例子,动作空间是 A = {左, 右, 上},那么动作空间的大小等于 |A| = 3,那么 DQN 的输出是 3 维的向量。由于上的得分(610)最高,所以Agent应该选择上这个动作。
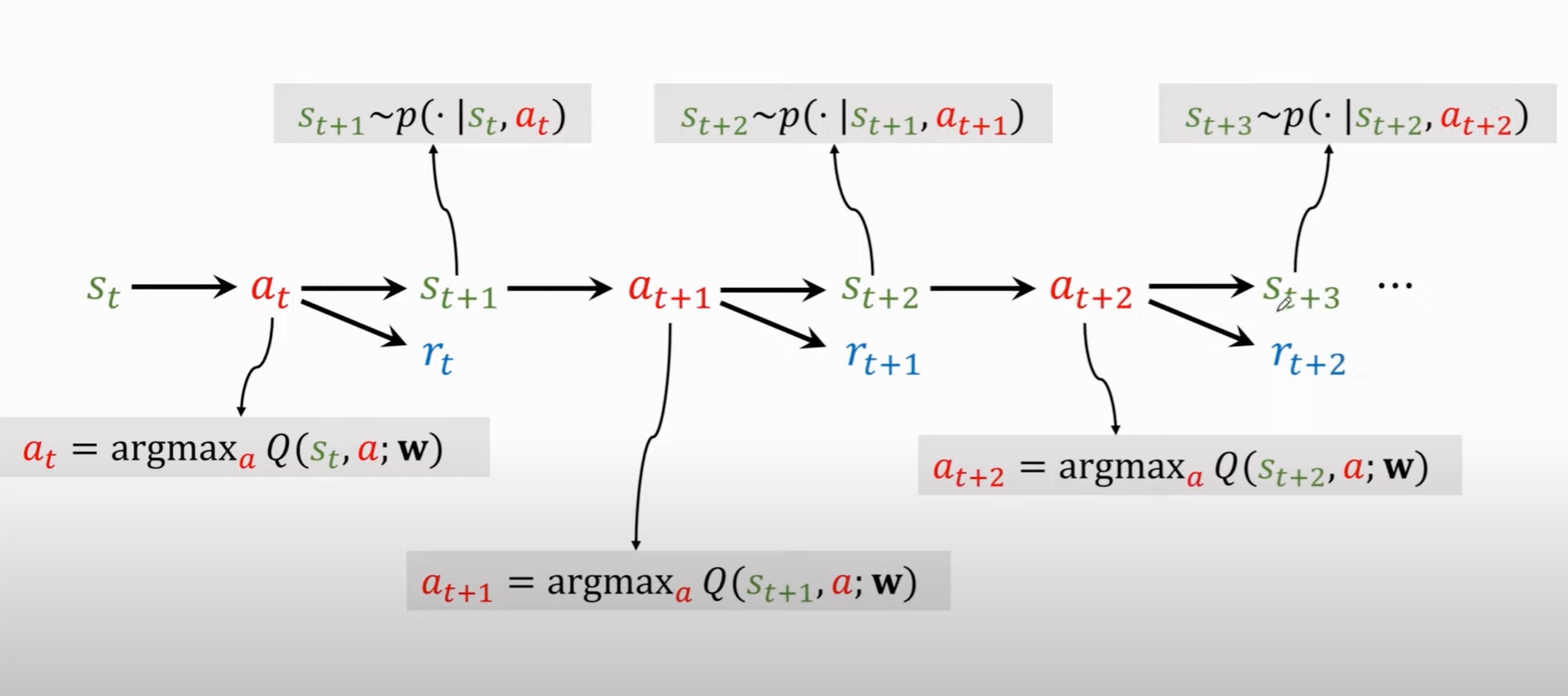
利用DQN玩游戏的过程
DQN的梯度
在训练 DQN 的时候,需要对 DQN 关于神经网络参数 w 求梯度。
表示函数值 Q(s, a; w) 关于参数 w 的梯度。因为函数值 Q(s, a; w) 是一个实数,所以梯度的形状与 w 完全相同。
我们一般使用TD算法来训练DQN
原始的TD算法
Agent观测到当前状态$s_t$并且执行动作$a_t$。
环境给出新的状态$s_{t+1}$并给出奖励$r_t$
- A transition:($s_t,a_t,r_t,s_{t+1}$)
- TD target:
- TD error:$\delta _t$ = $q_t$ - $y_t$, where $q_t$ = Q($s_t,a_t$,w)
goal:使$q_t$更加接近$y_t$。也就是说让TD error尽量小。
TD learning: L(w) = $\frac{1}{T} \sum_{t=1}^T \frac{\delta ^2}{2}$
Online Gradient descent:
- 观察($s_t,a_t,r_t,s_{t+1}$) 求出$\delta_t$
- 计算梯度:$g_t$ = $\delta_t$* $ \frac{\partial Q(s_t,a_T;w)}{\partial w}$
- 梯度下降:w <- w - $\alpha $ * $g_t$
- 丢弃($s_t,a_t,r_t,s_{t+1}$)
缺点:
- 浪费经验:原始的TD算法在做完一个transition就被丢弃不再使用,造成了经验的 浪费,事实上这些经验是可以重复使用的。这就是做“经验回放的主要原因”。
- transitions之间的相关性:我们按顺序使用每一条transition来更新w,前后两条transitions之间有很强的关联,实验证明这种相关性是有害的。如果能把序列打散,消除相关性,则有利于把DQN训练得更好。
“经验回放”可以有效克服刚才提到的两个缺点。
经验回放
- A transition ($s_t,a_t,r_t,s_{t+1}$)
- 存储最近b个transition放在replay buff中:
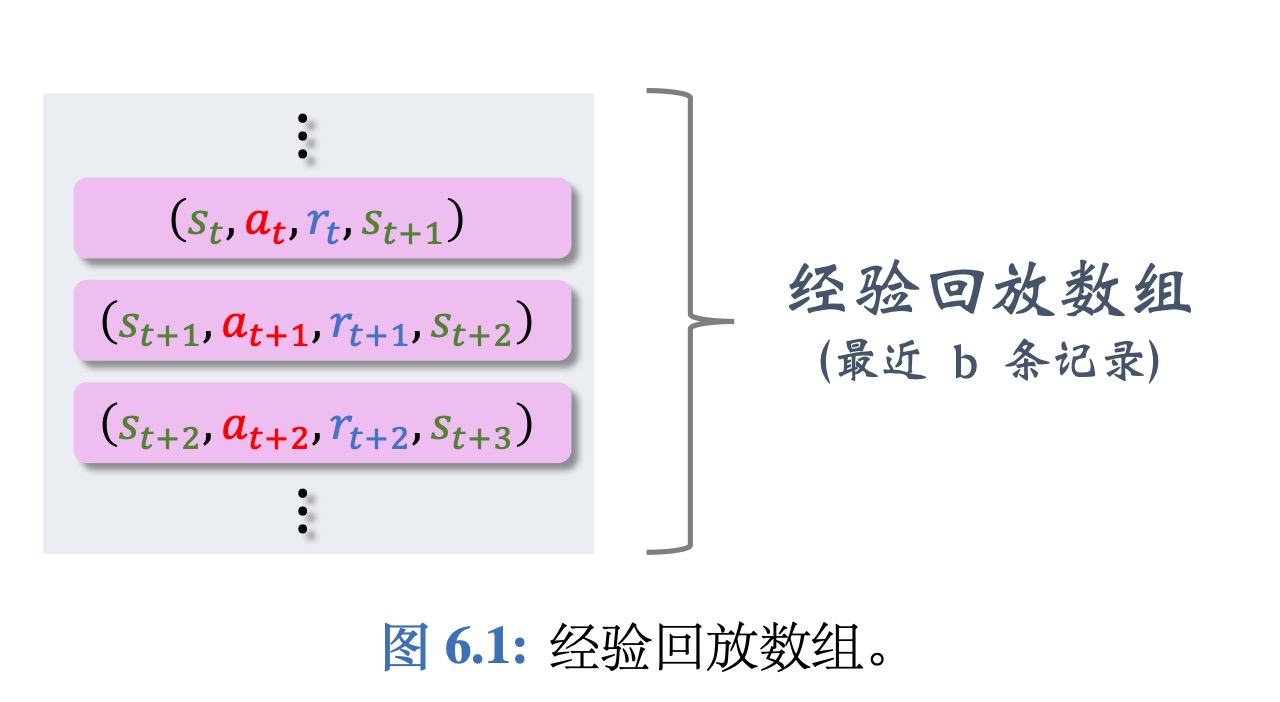
如果存满了则删除最久的一条transition,放入最新的transition。
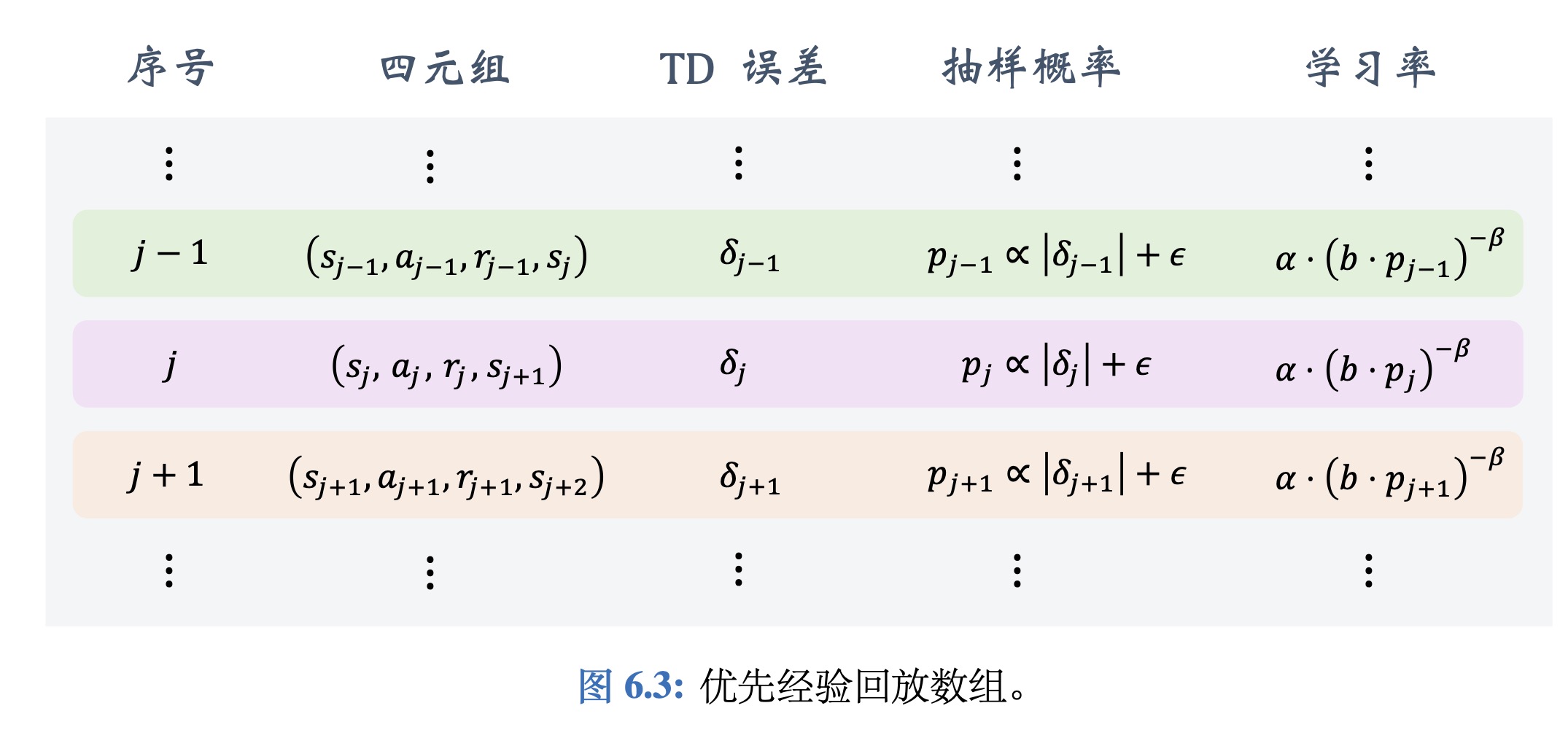
优先经验回放
优先经验回放(prioritized experience replay)是一种特殊的经验回放方法,它比普通 的经验回放效果更好:既能让收敛更快,也能让收敛时的平均回报更高。
基本想法是用非均匀抽样代替均匀抽样。两种方法设置抽样概率。
- 一种抽样概率是:
此处的ϵ是个很小的数,防止抽样概率接近零,用于保证所有样本都以非零的概率被抽到。
- 另一种抽样方式先对|$δ_j$|做降序排列,然后计算
此处的 rank(j) 是 |$δ_j$| 的序号。大的 |$δ_j$| 的序号小,小的 |$δ_j$| 的序号大。两种方式的原理 是一样的,|$δ_j$| 大的样本被抽样到的概率大。
两种抽样的原理是一样的,TD error越大,transition被抽到的概率就越大。
抽样的概率是不同的,也就是非均匀抽样。这样会导致DQN的预测有偏差,应该相应 调整学习率 ,抵消掉不同抽样概率造成的偏差。这里的 𝛼 是学习率也叫做步长。如果做均匀抽样,所有 transitions 都有相同的学习率。如果做非均匀抽样的话,应该根据抽样概率来调整学习率。如果一条 transition 有较大的抽样的概率,那么应该把它的学习率设置得较小
- 计算 𝑛 乘以$𝑝_𝑡$,求负𝛽次幂$(np_t)^{-𝛽}$把它乘到学习率上.𝛽$\in$[0,1]
- 在均匀抽样下,抽样概率$p_1,..,p_n = \frac{1}{n}$ ,在这种情况下所有的n乘以$p_t$都等于1,不会影响学习率。
- 如果是非均匀抽样,$𝑝_1$ 到 $𝑝_n$各不相同,于是学习率会有所不同。对于概率较大的$𝑝_𝑡$,算出来的幂较小,会让学习率变小,反之亦然。
- 𝛽是个超参数,需要调参。论文里建议一开始让 𝛽 很小,然后逐渐让 𝛽 增长,最终增长到1。
- 为了做“优先经验回放”,要把每一条transition 都标记上 TD Error$𝛿_𝑡$,$𝛿_𝑡$决定了这一条 transition 的重要性,决定了它被抽样的概率。
- 如果一个transition刚刚被收集到,还没有被用来训练DQN,我们不知道它的$𝛿_𝑡$:
- 我们就把它的$𝛿_𝑡$设置为最大。
- 给予它最大的权重。
- 在训练 DQN 的同时,要对$𝛿_𝑡$做更新。每次我们使用一条 transition 的时候,我们要重新计算它的$𝛿_𝑡$,这条 transition 就有了新的权重。
总结
高估问题
用TD算法训练DQN,会导致DQN高估真实的动作价值。
高估的原因:
•最大化:是计算 TD target 用到了最大化,它会导致高估
•Bootstrapping:如果当前 DQN 已经出现高估,下一轮的 TD target更会高估,再进一步推高DQN的输出,一步步让DQN的高估越来越严重。
最大化
数学解释
- 设$𝑥_1,..,𝑥_𝑛$为任意 n 个观测到的实数.
- 在$𝑥_1,..,𝑥_𝑛$中添加均值为零的随机噪声,将得到的输出记为$𝑄_1,..,𝑄_𝑛$
- 由于噪声的均值等于零,噪声不会影响 Q 的均值,我们可以得到Q的均值求期望,结果就等于x的均值:
$\mathbb{E} [mean_i(Q_i)]= mean_i(x_i)$ - 但是噪声会让最大值增长,Q的最大值往往大于x的最大值,对Q的最大值求期望,结果一定会大于等于x的最大值:
$\mathbb{E} [max_i(Q_i)] ≥ max_i(x_i)$ - 同样的道理,随机噪声会让最小值变得更小,Q 的最小值往往会小于 x 的最小值:
$\mathbb{E} [min_i(Q_i)] ≤ min_i(x_i)$
在DQN中
- 设 $𝑥(𝑎_1),..,𝑥(𝑎_𝑛)$为真实的动作价值,$𝑎_1,..,𝑎_𝑛$是动作空间中所有的动作。
- DQN的估算价值为:$𝑄(𝑠, 𝑎_1;𝐰),..,𝑄(𝑠, 𝑎_𝑛;𝐰)$。
- 假设没有误差,同理有:
$\mathbb{E} mean_a(x(a))= mean_a𝑄(𝑠, 𝑎;𝐰)$ - 计算TD target的时候,要对DQN关于动作a求最大化,把结果记做q = $max_a𝑄(𝑠, 𝑎;𝐰)$,之前我们分析过,往 x 里面加噪声,然后求最大化,得到的结果会高估 x 的最大值.同理也有
q ≥ $max_a(x(a))$
求最大化使得 TD target 大于真实价值,因此导致 DQN 高估
Bootstrapping
在强化学习中,Bootstrapping的意思是“用一个估算去更新同类的估算”,也就是自己把自己举起来。例如在TD算法中,我们为了更新DQN咋t时刻的预测,用来DQN在t+1时刻做出的预测。就算是Bootstrapping。
- TD中的Bootstrapping
- TD target用到了DQN在t+1时刻的估计值$q_{t+1} = max_a Q (s_{t+1},a;w)$。
- 我们拿 TD target 来更新 DQN 在 t 时刻的估计,这就是用 DQN 来更新 DQN 自己,所以叫做Bootstrapping
- 假设DQN已经高估了动作价值。
- 那么Q($s_{t+1},a,w$)也是一个高估。
- 最大化$q_{t+1}$也会被高估,进一步推高高估价值。
- 拿$q_{t+1}$计算 TD target,再更新DQN,这样高估又被传播回 DQN,让DQN的高估变得更严重。
高估为什么有害
DQN输出的动作价值,Agent选择价值最大的动作执行。这个决策根据的是 相对大小 而不是绝对大小。
高估本身不是问题,只要高估是均匀的就好。
假设三个动作的价值:a = 200,b = 100, c = 230
如果高估是均匀的,那么对决策不会产生影响。如果高估是非均匀的,有的动作被高估一点,有的则被高估很多,DQN的输出变成了
a = 280,b = 300,c = 240。这样的价值就产生了误导,会做出错误的决策。实际上DQN的高估是非均匀的,如果一个transition在replay buffer里出现的越频繁,高估就越严重。(每次更新都会造成一次高估 )
解决高估的方法
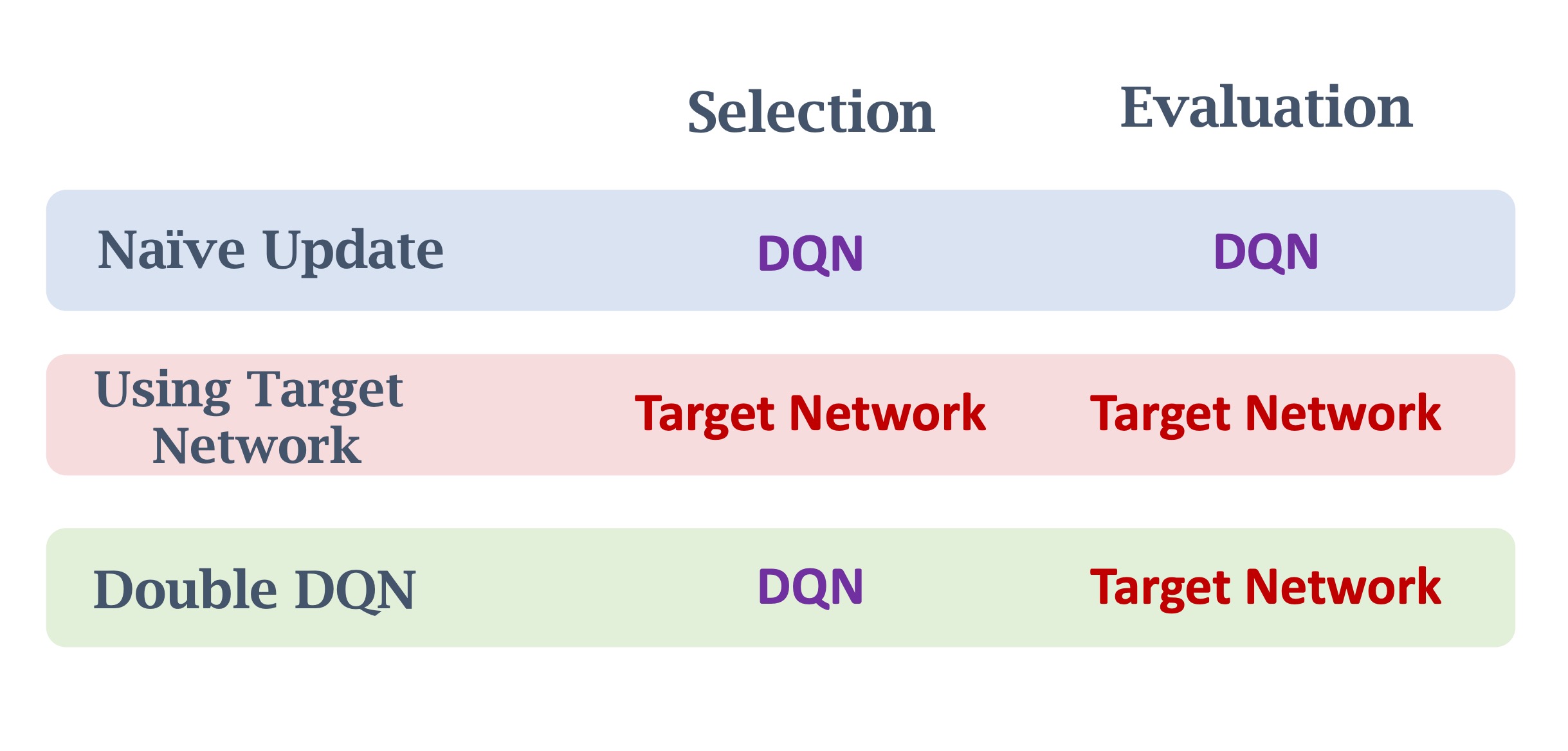
- 避免 Bootstrapping:不要用 DQN 自己算出来的TD Target来更新 DQN,而是用另一个神经网络来计算TD target,另一个神经网络被称作 target network ,目标网络。
Double DQN:用来缓解“最大化”造成的高估。Double DQN 也用 target network,但是具体用法有一点点区别。
Target Network
用两个神经网络,第二个神经网络叫做 target network。
- Taregt Network:Q(s,a;$W^-$)
- 与DQN有相同的网络结构,Q(s,a;w)。
- 不同在于参数$w^-$ ≠ w。
- DQN,Q(s,a;w)用来控制Agent,并收集经验,经验为多条transition{($s_t,a_t,r_t,s_{t+1}$)}。
- Target Network,Q(s,a;$w^-$)唯一的用途是用来计算TD target。
- Taregt Network:Q(s,a;$W^-$)
用在TD算法上
使用transition($s_t,a_t,r_t,s_{t+1}$)来更新w。
- TD target:$y_t=r_t+\gamma * \max_a (s_{t+1},a;w^-)$ (这里用的是Target Network中的参数$w^-$)
- TD erroe:$\delta _t$ = $q_t$ - $y_t$, where $q_t$ = Q($s_t,a_t$,w)
- SGD: w <- w - $\alpha $ $\delta_t$ $ \frac{\partial Q(s_t,a_T;w)}{\partial w}$ (这里只更新DQN中的参数w,不更新TargetNetwok的参数)
Target Network中的参数$w^-$需要隔一段时间更新:
- 方式一:直接拷贝DQN中的参数w。 $w^-$ <- w
- 方式二:做加权平均。$w^-$ <- $\tau$ w + (1 - $\tau $) $w^-$
比较
- DQN自己更新:$y_t=r_t+\gamma * \max_a $($s_{t+1}$,a;w)
- Target Network更新:$y_t=r_t+\gamma * \max_a $($s_{t+1}$,a;$w^-$)
用 target network 会减小DQN高估的程度,让DQN表现得更好,但还是无法避免高估。即使用了 target network,也还有最大化操作,仍然会让 TD target 大于真实价值,除此之外,target network会用到DQN的参数,target network 无法独立于 DQN,所以无法完全避免 bootstrapping。
Double DQN
TD Target:$y_t=r_t+\gamma * \max_a $($s_{t+1}$,a;$w$)
将TD target的公式拆成两步:
- 在DQN中,选出能最大化 Q 函数的动作,记为$a^*$:
- 然后再Target Network中计算 TD target:
不同于前面的原始DQN和Target Network都是在自己的网络中计算最大值和求Target Network。
我们可以知道:
Q($s_{t+1,a^*;w^-}$) ≤ $\max _a Q(t+1,a;w^-)$
比较
Dueling Naetword
网络结构
- 最优动作价值函数:$Q^{\ast}(s,a)=\max_πQ_π(s,a)$.
- 最优状态价值函数:$V^{\ast}(s)=\max_πV_π(s)$.
- 优势函数:$A^{\ast} (s,a)=Q^{\ast}(s,a)-V^{\ast}(s)$.
优势函数的意思是动作a相对于baseline的优势。
- 定理1:$V^{\ast}(s)=\max_aQ^{\ast}(s,a)$
- 由(1)可知:$\max_a A^{\ast}(s,a)=\max_aQ^{\ast}(s,a)-V^{\ast}(s)=0$.
- 变化优势函数的定义可以得到:$Q^{\ast}(s,a)=V^{\ast}(s)+A^{\ast}(s,a)-\max_aQ^{\ast}(s,a)$.
- 构建网络:
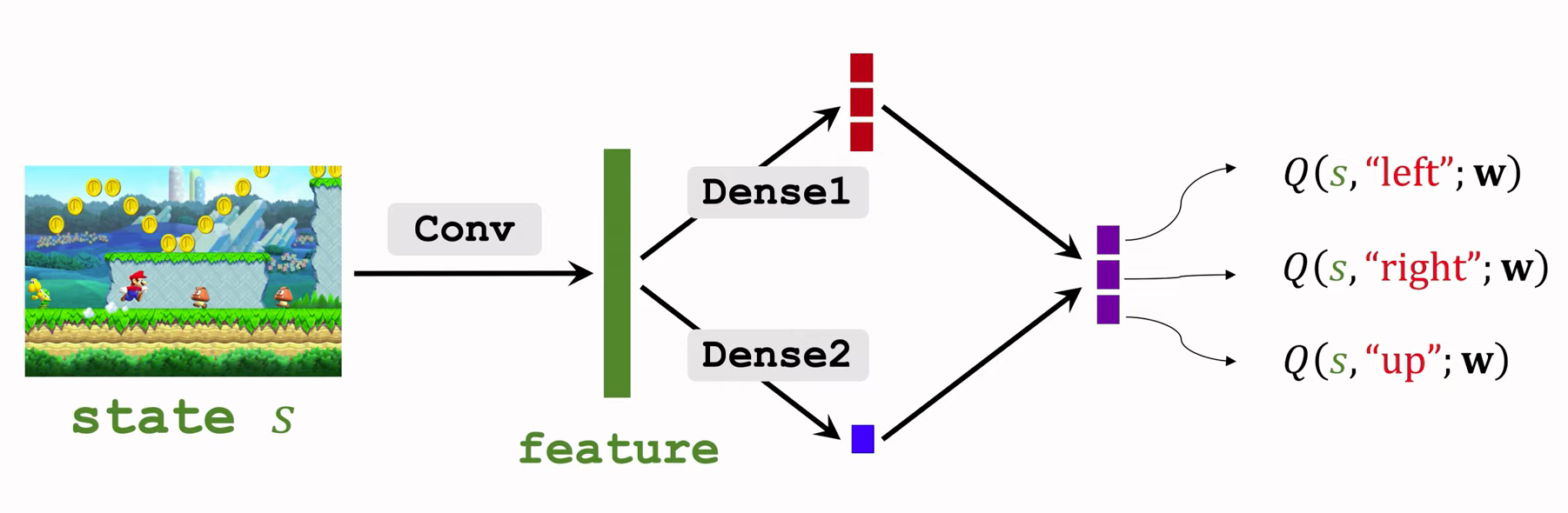
训练过程和DQN网络一样。
解决唯一性问题
- 公式1:$Q^{\ast}(s,a)=V^{\ast}(s)+A^{\ast}(s,a)$.
- 公式1缺点:无法通过学习$Q^{\ast}(s,a)$,来唯一确定$V^{\ast}(s)$和$A^{\ast}(s,a)$。
- 让$V^{‘}=V^+10$和$A^{‘}=A^-10$。
- 那么$Q^{\ast}(s,a)=V^{\ast}(s)+A^{\ast}(s,a)=V^{‘}(s)+A^{‘}(s,a)$.
- 得到的结果不唯一。
- 不唯一会导致神经网络不稳定,训练不好。
- 公式2:$Q^{\ast}(s,a)=V^{\ast}(s)+A^{\ast}(s,a)-\max_aQ^{\ast}(s,a)$可以避免不唯一性。
- $Q^{\ast}(s,a)=V^{\ast}(s)+A^{\ast}(s,a)-meanQ^{\ast}(s,a)$效果更好。